Introduction to ISO 24730
ISO/IEC 24730 defines protocols for transferring information between different Real Time Location Systems.
SmartSpace ISO 24730 consists of Ubisense services and tools that allow a Ubisense system to receive real-time locations using a ‘Text over Socket’ connection over TCP/IP. The Ubisense services act as a client connecting to a server within a third-party RTLS system. The services are added to a Ubisense dataset which contains the Ubisense platform and, optionally, additional Ubisense applications.
The Ubisense ISO 24730 package is available for Microsoft® Windows® and for Linux.
Purpose of this Manual
This User Manual is a guide to the configuration and use of the Ubisense ISO 24730 Interface. It is divided into the following sections:
- ISO 24730 Service Installation: instructions for installing the components
- ISO 24730 System Configuration: instructions for configuring the system
- ISO 24730 Service Behavior: a description of the system’s behavior
The user should read this entire manual before attempting to install and configure the system.
References
[1] ISO/IEC 24730-1:2014(E) – Information technology – Real-time locating systems (RTLS) – Part 1: Application programming interface (API)
ISO 24730 Service Installation
There are two services in the SmartSpace ISO 24730 package: Configuration Server and Forwarder Server.
To install the ISO 24730 feature:
- Make sure that the SmartSpace platform includes a license for ISO 24730 version 3.2 or higher.
- Install the ISO 24730 feature using Service Manager.
For further information on installing SmartSpace features see SmartSpace Installation.
ISO 24730 System Configuration
The Ubisense services are configured using the ubisense_iso24730_client_config.exe tool. The configuration tool supports the following operations:
|
Mode |
Description |
|---|---|
|
list |
List the current configuration in a form that can be stored in a batch file and used to recreate the configuration. |
|
setserver |
Define an external RTLS server which provides ISO24730 Locate Messages, specify its address and associate it with a Ubisense cell. |
|
removeserver |
Remove an external RTLS server. |
|
setoptions |
Set options for handling Locate Messages from an external RTLS server. |
|
removeoptions |
Remove options for an external RTLS server. |
|
settransform |
Set a transform to apply to positions in Locate Messages from an external RTLS server. |
|
removetransform |
Remove transform for an external RTLS server. |
list
Syntax:
ubisense_iso24730_client_config.exe list
Example output:
# List of all servers ubisense_iso24730_client_config.exe setserver "AA" "Location Cell 00001" "10.42.5.186" 11 ubisense_iso24730_client_config.exe setserver "BB" "Location Cell 00001" "10.42.5.186" 22 # List of server options ubisense_iso24730_client_config.exe setoptions -s "AA" # List of server transforms ubisense_iso24730_client_config.exe settransform "BB" 2 -1 0 -45 0 0
setserver
Syntax:
ubisense_iso24730_client_config.exe setserver <name> <cell> <host> <port>
Parameters:
|
name |
The unique name to give to the server. This name is used to give options and a transform to the server. |
|
cell |
The name of the Ubisense cell to associate with the server. |
|
host |
The DNS name or IP address of the server's host. The Forwarder Server will connect to this address. |
|
port |
The number of the port to connect to on the server's host. The Forwarder Server will connect on this port. |
Example:
ubisense_iso24730_client_config.exe setserver RTLS1 ‘Location Cell 00001’ 10.42.5.222 12345
removeserver
Syntax:
ubisense_iso24730_client_config.exe removeserver <name>
Parameters:
|
name |
The unique name of the server. |
setoptions
Syntax:
ubisense_iso24730_client_config.exe setoptions [OPTIONS] <name> options Parameters:
|
name |
The unique name of the server. |
|
options |
A list of custom options, of the form ‘opt1=val1:opt2=val2’, whose meaning is known to the forwarder. |
Options:
|
-s, --updatesync |
Use synchronous method to pass position from Locate Message to Ubisense Cell, i.e. block until each position has been permanently stored. The default is to use an asynchronous method which returns immediately but does not guarantee that all positions will be persistent. |
|
-b, -usebattery |
Use the tag battery level values from the Locate Message and pass them to the Ubisense Battery Monitor. The default is to ignore battery levels. |
Custom Options:
|
KeepAliveTime |
The time (in seconds) that the connection should be kept alive, in the absence of any messages from the server, if the server does not send a KeepAlive message. Default is 5s. |
|
BatteryUpdateInterval |
The time (in seconds) between successive battery status updates, if the battery level values from the Locate Message are being used and the value does not change. Default is 3600s. |
Example:
ubisense_iso24730_client_config.exe setserver –b RTLS1 KeepAliveTime=30:BatteryUpdateInterval=300
removeoptions
Syntax:
ubisense_iso24730_client_config.exe removeoptions <name>
Parameters:
|
name |
The unique name of the server. |
settransform
Syntax:
ubisense_iso24730_client_config.exe settransform [OPTIONS] <name> -- <off_x> <off_y> <off_z> <yaw> [pitch] [roll]
Parameters:
|
name |
The unique name of the server. |
|
off_x |
The offset to add to the x coordinate from the Locate Message after applying any rotation and before passing the position to the Ubisense Cell. |
|
off_y |
The offset to add to the y coordinate from the Locate Message after applying any rotation and before passing the position to the Ubisense Cell. |
|
off_z |
The offset to add to the z coordinate from the Locate Message after applying any rotation and before passing the position to the Ubisense Cell. |
|
yaw |
The rotation, in degrees, around the z axis (i.e. in the xy plane) to apply to positions from the Locate Message before the x, y & z offsets are added. The angle is the same as the angle from the x axis in the Ubisense coordinate system to the x axis in the external RTLS coordinate system. |
|
pitch |
(optional) The rotation, in degrees, around the y axis (i.e. in the xz plane) to apply to positions from the Locate Message before the x, y & z offsets are added. |
|
roll |
(optional) The rotation, in degrees, around the x axis (i.e. in the yz plane) to apply to positions from the Locate Message before the x, y & z offsets are added. |
Options:
|
-l, --lefthanded |
The positions supplied in the Locate Message use left-handed axes, i.e. the y coordinate must be negated. The default is to use righthanded axes which is what Ubisense uses. |
Example 1:
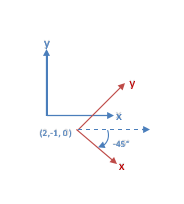
Consider the two coordinate systems above where the blue axes are the Ubisense coordinate system and the red axes are the external RTLS coordinate system. The offset is the location of the origin in the external RTLS as expressed in the Ubisense coordinate system. In the example this is (2, -1, 0). The rotation is the angle between the x-axis of the Ubisense coordinate system and the x-axis of the external RTLS coordinate system. In the example this is -45 degrees. So the command to configure this transformation is
ubisense_iso24730_client_config.exe settransform RTLS1 -- 2 -1 0 -45
Example 2:
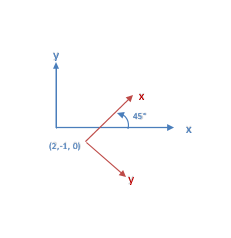
Consider the two coordinate systems above where the blue axes are the Ubisense coordinate system and the red axes are the external RTLS coordinate system. The external RTLS uses a left-handed coordinate system. The offset is the location of the origin in the external RTLS as expressed in the Ubisense coordinate system. In the example this is (2, -1, 0). The rotation is the angle between the x-axis of the Ubisense coordinate system and the x-axis of the external RTLS coordinate system. In the example this is +45 degrees. So the command to configure this transformation is
ubisense_iso24730_client_config.exe settransform –l RTLS1 -- 2 -1 0 45
removetransform
Syntax:
ubisense_iso24730_client_config.exe removetransform <name> Parameters:
|
name |
The unique name of the server. |
ISO 24730 Service Behavior
Configuration Server Behavior
The Configuration Server stores all the configuration values.
The Configuration Server is also responsible for deploying and undeploying the Forwarder Services for Ubisense Cells. The Configuration Service will ensure that those Cells which have external RTLS servers associated with them have Forwarder Servers deployed. If a Cell has an external RTLS server associated but no Forward Server then a Forwarder Server is deployed, for that cell, and started. If a Cell has a Forwarder Server but no external RTLS servers associated with it then the Forwarder Server is undeployed.
The behavior of the Configuration Server can be monitored with the iso_24730_config stream.
Forwarder Server Behavior
The Forwarder Server connects to all the external servers which are associated with its Ubisense Cell. It creates a socket connection to each server using the host and port stored in the configuration. It then listens for and parses all messages sent by the server.
The Forwarder will parse and act on the LocateMessageDefinition, KeepAlive and LocateMessage messages. It will ignore FieldDefinition messages as it only uses the default formats.
When a LocateMessage message is received the position (x,y,z), battery status and timestamp are extracted.
The position is mapped from the coordinate system of the external RTLS to the Ubisense coordinate system as follows:
- if the ‘left-handed flag’ is set negate the y coordinate
- rotate new the position about the origin of the external RTLS coordinate system using the configured rotation
- add the x, y & x offsets to the new position
The Forwarder then determines which Ubisense Cell contains the position, using the extents of the Cells, and queues a Location Event, including the position and timestamp, to send to that Cell. If the ‘synchronous flag’ is set then the Forwarder waits for each Location Event, in the queue, to be actioned before sending the next one, otherwise queued Location Events are sent as fast as possible. If the position is not in any Ubisense Cell then it is ignored.
If the ‘use battery flag’ is set then the battery status is sent to the Ubisense Battery Monitor.
The behavior of the Forwarder Server can be monitored with the iso_24730_forwarder stream.